III Accelerated translational coordinate
system.
a)
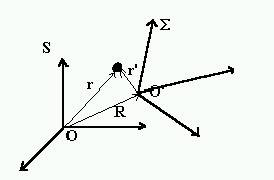
Consider two reference frames S
and S’ and a pair of coordinates systems with fixed relative orientations in
space. Consider a point P of the physical space, at this location a particule is
moving and we will study his movement. The position vector r,
of the particule relative to
the origin of the coordinate system S,
O (see fig.1), will be denoted ïr>,
The position vector R, of the origin
O’, of the coordinate system S’relative to the origin O, will be denoted çR>,
and the position vector r’, of the
particule relative to the origin O’, will be denoted
êr’>.
In order to give a algebraic representation of vectors we will take a basis íêen>ý
in S
and a basis íêei>ý
in S’. From the geometrical point of view we see that
êr>
= êR>
+ êr’>
...(3)
Fig (1) Moving coordinates systems
Diferentiating
this equation we obtain the velocity of the particule relative to O and O’.
çv>
= çU>
+ çv’> (4)
çv>
is the velocity of the particule relative to O and is the velocity measured by
an observer fixed in system S,
çU>
is the velocity of O’ relative to
O; and çv’>
the velocity of the particule relative to O’ and is the velocity as seen by an
observer fixed in system S’.
If
we are interested in the relation between the coordinates of the velocity of the
particule as measured by observers in system S
and S’, we have to diferentiate equation (4) in the algebraic representation.
In order to make this, we have to follow the following procedure: project eq (4)
on a coordinate system, diferentiate de coordinates, and, multiply by the unit
vectors of this particular coordinate system. This procedure can be sintetized
by the application of the operator:
å13
êen>
d/dt <en
ê
or equivalently å13
êei>
d/dt <ei
ê
The
result of the application of this operator will give eq. (4) in the particular
basis used.
In
the following, we will assume that repeated indexes will denote sum.
Time
diferentiation of eq.(4) in S
gives:
êen>
d/dt <ençr>
= êen>
d/dt <enêR>
+ êen>
d/dt <enêr’>
or
êen><ençv>
= êen>
<enêU>
+ êen>
d/dt <enêr’>
êen>
d/dt <enêr’>,
is the velocity of the particule relative to the origin O’ of
S’ expressed in the basis íený
of S.
If we are interested in the relation between the coordinates of the velocity of
the particule as measured by an observer in S
and an observer in S’, we
introduce the unity operator êei><eiç
to obtain
êen><ençv>
= êen>
<enêU>
+ êen>
d/dt <enêei><ei
êr’>
As
the orientation of the basis S’
and S
are fixed then: d/dt <enêei>
= 0, and
êen><ençv>
= êen>
<enêU>
+ êen>
<enêei>
d/dt <ei
êr’>
Where d/dt <ei
êr’>
= <ei
êv’>
is the derivative of the components of r’
referred to the basis íçej>ý,
then:
êen><ençv>
= êen>
<enêU>
+ êen>
<enêei>
<ei
êv’>
This
is the same as eq.(4) in the algebraic form.
Diferentiation
of eq.(4) give similarly
êa>
= êA>
+ êa’>
or
in algebraic form
êen><ença>
= êen>
<enêA>
+ êen>
<enêei>
<ei
êa’>
êa>
is the acceleration of the particule relative to O, and is the measured
acceleration for an observer in S, êA>
is the acceleration of O’ relative to O, physicaly is the acceleration of the
observer in S’ as observed by the observer in S;
and êa’>
is the acceleration of the particule relative to O’, or the measured
acceleration for an observer in S’.